[ROS 튜토리얼] 1.1.1 ROS 설치 및 환경 구축
- 취미/ROS
- 2021. 3. 14.
Installing and Configuring Your ROS Environment
Description : 이튜토리얼은컴퓨터에ROS를설치하고ROS환경을설정하는과정을설명한다.
Tutorial Level : BEGINNER
Next Tutorial : Navigating the ROS Filesystem
1. Install ROS
ROS 설치 과정인데 이미 설치했으므로 패스.
아직 ROS 설치를 하지 않았다면 아래를 참조.
ROS/Installation - ROS Wiki
Available Translations: German | Spanish | French | Italian | Japanese | Korean | Brazilian Portuguese | Portuguese | Русский (Russian) | Thai | Turkish | 简体中文 | Ukrainian | Vietnamese See Also: ROS/Installation (this page) Distributions Ins
wiki.ros.org
2021.01.12 - [ROS/우분투 설치] - [Ubuntu] 맥 OS에서 Parallels 가상 머신으로 Ubuntu 설치하기 #1 "기본 OS 설치"
[Ubuntu] 맥 OS에서 Parallels 가상 머신으로 Ubuntu 설치하기 #1 "기본 OS 설치"
컴퓨터에 우분투(Ubuntu)를 설치하는데에 크게 두 가지 방법이 있습니다. 가상 머신(Virtual Machine) 실제 머신(Real Machine) 이 글에서는 1번 가상 머신으로 설치하는 방법을 다룰 것입니다. (각 방법마
conceptbug.tistory.com
2. Managing Your Environment
During the installation of ROS, you will see that you are prompted tosource one of several setup.*sh files, or even add this 'sourcing' to your shell startup script.This is required becauseROS relies on the notion of combining spaces using the shell environment.This makes developing against different versions of ROS or against different sets of packages easier.
If you are ever having problems finding or using your ROS packages make sure that you have your environment properly setup. A good way to check is to ensure that environment variables like ROS_ROOT and ROS_PACKAGE_PATH are set:
printenv | grep ROS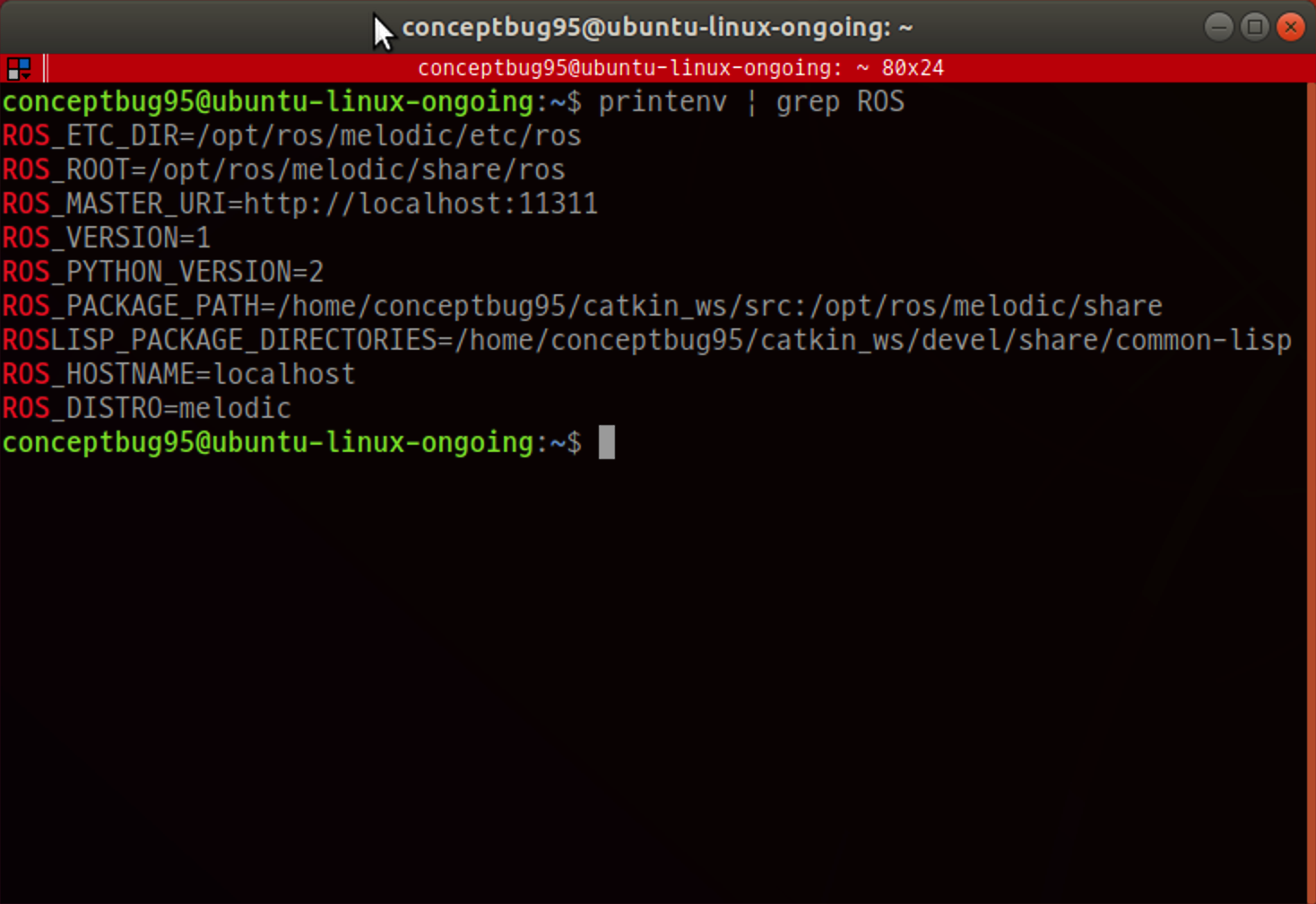
이 과정도 앞서 홈 디렉토리의 .bashrc 파일에 쉘이 실행될 때 마다 불러올 ROS 설정들을 추가해놓았기 때문에 패스.
2021.01.26 - [ROS/우분투 설치] - [Ubuntu] 맥 OS에서 Parallels 가상 머신으로 Ubuntu 설치하기 #2 "개발자 환경 설정"
[Ubuntu] 맥 OS에서 Parallels 가상 머신으로 Ubuntu 설치하기 #2 "개발자 환경 설정"
2021/01/12 - [ROS/우분투 설치] - [Ubuntu] 맥 OS에 Parallels 가상 머신으로 Ubuntu 설치하기 #1 [Ubuntu] 맥 OS에서 Parallels 가상 머신으로 Ubuntu 설치하기 #1 "기본 OS 설치" 컴퓨터에 우분투(Ubuntu)를 설..
conceptbug.tistory.com
3. Create ROS Workspace
catkin툴을 사용하여 ROS 작업공간을 만드는 방법을 기술해놓았다. 원하는 위치에 원하는 이름으로 디렉토리를 생성하는데, 새로 생성한 디렉토리 내부에 소스 파일들이 저장될 src 디렉토리를 만들어 주어야 한다. 아래 예시는 내가 catkin 작업공간으로 만들 디렉토리 이름이 catkin_ws 일 때(추후 진행되는 모든 튜토리얼에서도 기본적인 catkin 작업공간은 home 디렉토리의 catkin_ws 디렉토리일 것이다. 헷갈리지 않으려면 이 디렉토리를 디폴트로 생각하고 진행하는것이 좋다) 작성하게 될 명령어다.
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make정상적으로 빌드되었다면 catkin_ws 디렉토리 안에 .catkin_workspace파일이 생겨나고 build, devel이라는 디렉토리도 새로 생성되어 있을것이다. 또한 먼저 만들어둔 src 디렉토리에도 CMakeLists.txt라는 파일도 생성된것을 볼수있다.
터미널을 열고나서 CLI로 빌드했기 때문에, .bashrc파일에 ROS 설정들이 명시되어 있어도 현재 빌드된 내용은 다시 소싱되지 않았기 때문에 적용되지 않은 상태다. 빌드 후 터미널을 새로 열어 작업하던지, 아니면 source devel/setup.bash명령어를 통해 다시 소싱해준다.
'취미 > ROS' 카테고리의 다른 글
| [ROS 튜토리얼] 1.1.3 패키지 생성하기 (0) | 2021.03.22 |
|---|---|
| [ROS 튜토리얼] 1.1.2 ROS 파일 시스템 활용 방법 (0) | 2021.03.16 |
| [ROS] Intel - RealSense 'd435' depth camera (5) | 2021.01.30 |
| [ROS] Ubuntu 18.04 LTS에 ROS Melodic 설치하기 #2 (0) | 2021.01.10 |
| [ROS] Ubuntu 18.04 LTS에 ROS Melodic 설치하기 #1 (0) | 2021.01.08 |